Publications
publications by categories in reversed chronological order
Under Review
2026
2025
Journal Articles
2026
2025
2024
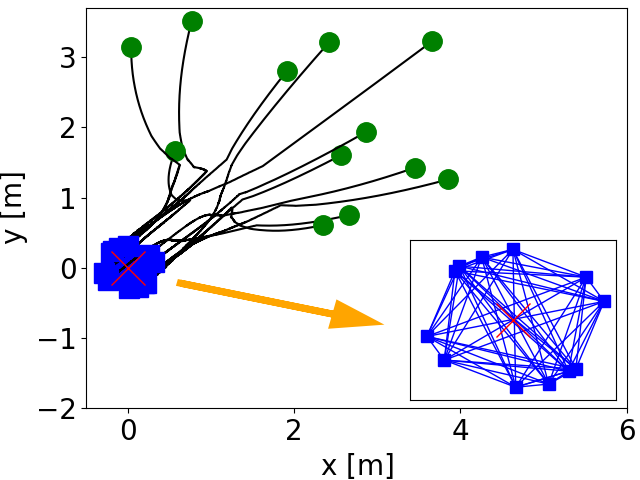
- Port-Hamiltonian Neural ODE Networks on Lie Groups For Robot Dynamics Learning and ControlIEEE Transactions on Robotics, Honorable Mention of the 2024 T-RO King-Sun Fu Memorial Best Paper Award and Best Paper Award from the IEEE RAS Technical Committee on Robot Control , 2024